In March 2004, I had the good fortune of attending Defense Department's first autonomous (self-driving) vehicle race. The U.S. Defense Department wanted vehicles that could drive themselves for long distances, so it sponsored a race to spur people into developing new self-navigation technologies. The race started in Barstow, Calif--see my story at Government Computer News. I also snapped some photos....
 DARPA’s
robot race got underway in the pre-dawn hours. Starting chutes were
fashioned from concrete bunkers. Once an official waved a green flag,
the vehicle had 30 seconds to get out the starting gate...
DARPA’s
robot race got underway in the pre-dawn hours. Starting chutes were
fashioned from concrete bunkers. Once an official waved a green flag,
the vehicle had 30 seconds to get out the starting gate...
 Virginia
Tech’s vehicle bolts out of the starting gate, followed closely by
the control vehicle, which was manned by a DARPA official to watch
the autonomous vehicle and stop it if got into a dangerous situation:
Virginia
Tech’s vehicle bolts out of the starting gate, followed closely by
the control vehicle, which was manned by a DARPA official to watch
the autonomous vehicle and stop it if got into a dangerous situation:
 Virginia
Tech’s vehicle being driven off the course, after its brakes locked
up, disqualifying it from competition.
Virginia
Tech’s vehicle being driven off the course, after its brakes locked
up, disqualifying it from competition.
 CanjunBot runs itself into a fence, and tries to hop over a bush
CanjunBot runs itself into a fence, and tries to hop over a bush
 Team ENSCO’s vehicle came to a spectacular end, after bolting from the
starting gate and flipping over in some rough terrain.
Team ENSCO’s vehicle came to a spectacular end, after bolting from the
starting gate and flipping over in some rough terrain.
 University of Florida’s Navigator trucks off down the road.
University of Florida’s Navigator trucks off down the road.
 CalTech team leader Richard Warren, his team’s vehicle off in the distance,
beyond his help
CalTech team leader Richard Warren, his team’s vehicle off in the distance,
beyond his help
 Team CalTech’s vehicle.
Team CalTech’s vehicle.
 No steering wheel needed for CalTech truck.
No steering wheel needed for CalTech truck.
 CalTech’s vehicle was run by a team of personal computers, networked together.
CalTech’s vehicle was run by a team of personal computers, networked together.
 Team TerraMax’s 5-ton truck tools down the road, sans driver.
Team TerraMax’s 5-ton truck tools down the road, sans driver.
 The Blue Team’s self-driving motorcycle proved to be a limited success.
Here it is disabled, a few feet from the starting gate.
The Blue Team’s self-driving motorcycle proved to be a limited success.
Here it is disabled, a few feet from the starting gate.
 Here is some of the terrain these vehicles needed to navigate through
Here is some of the terrain these vehicles needed to navigate through
 SciAutonics’ vehicle traveled almost a mile before veering off-route
SciAutonics’ vehicle traveled almost a mile before veering off-route
 Warner Williams, who headed up Team Phantasm. Williams’ team had to forfeit in the last day of qualifications. A defective radar burned fried his vehicle’s computer in the process.
Unfortunately, his programmer did not make a backup of the control program for the vehicle
Warner Williams, who headed up Team Phantasm. Williams’ team had to forfeit in the last day of qualifications. A defective radar burned fried his vehicle’s computer in the process.
Unfortunately, his programmer did not make a backup of the control program for the vehicle
 The Golem Team’s dark house vehicle, a Ford F-150, which defied
expectations by traveling over 5 miles
after a weak qualification
The Golem Team’s dark house vehicle, a Ford F-150, which defied
expectations by traveling over 5 miles
after a weak qualification
 Many of the vehicles used a commercial light detection and ranging, or
Lidar, units, to find their way along the route
Many of the vehicles used a commercial light detection and ranging, or
Lidar, units, to find their way along the route
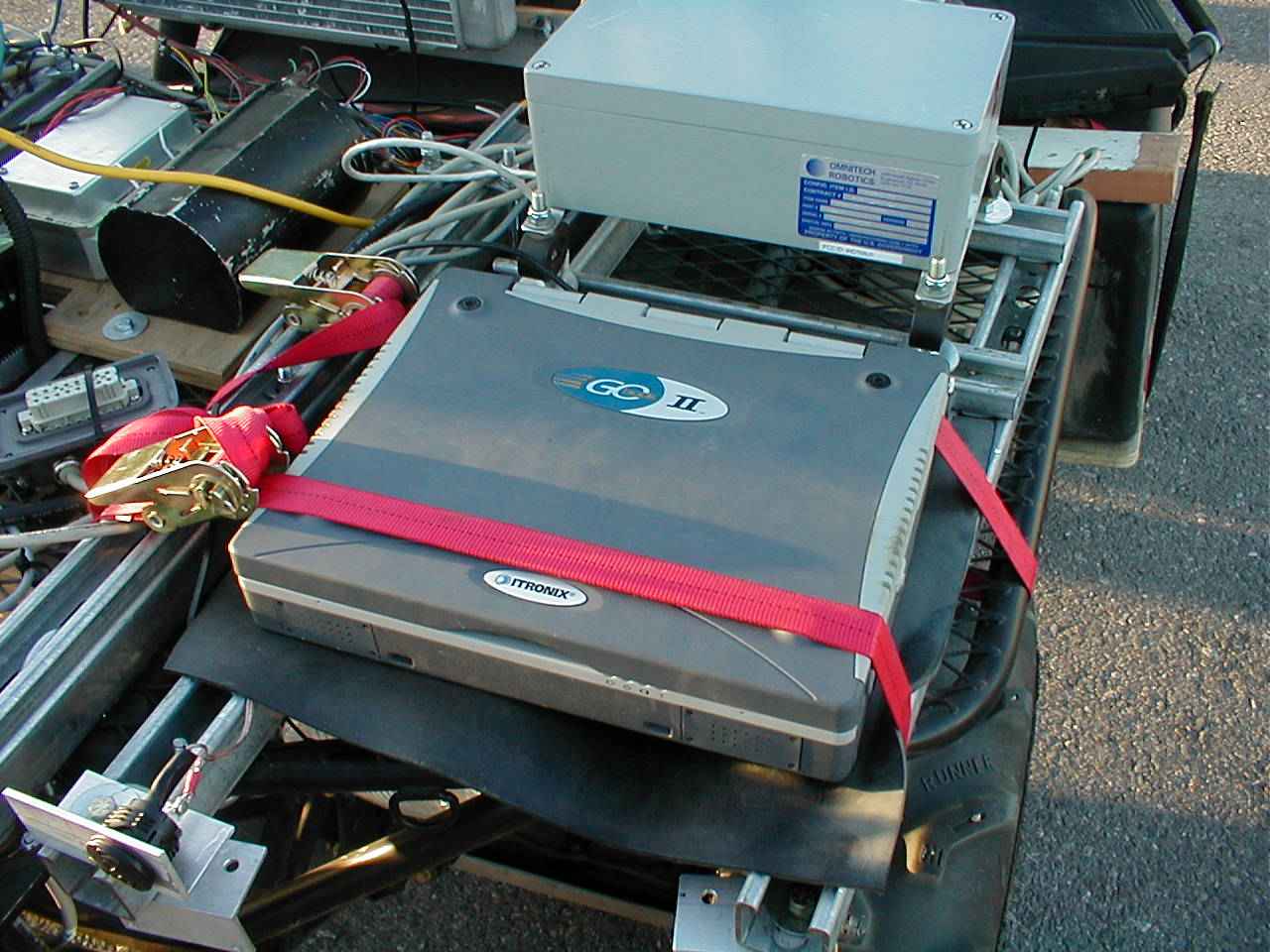 A few teams used hardened laptops for vehicle control. SciAutonics’
Rascal used an Itronix GoBook
A few teams used hardened laptops for vehicle control. SciAutonics’
Rascal used an Itronix GoBook
 Team CajunBot takes their vehicle out for a joyride after the race
Team CajunBot takes their vehicle out for a joyride after the race